Dynamics of Granular Materials
Granular materials are collections of macroscopic particles which show complex, multi-phase behavior. We are interested in robotic locomotion on granular surfaces since energy expenditures of robotic locomotion moving on granular surfaces are significantly higher compared to the packed, flat surfaces. In addition, traction loss on granular surfaces can result in immobility and entrapment of vehicles that are moving in inaccessible territories (e.g. Mars Rover Spirit). Understanding granular media behavior under dynamic loading will help us reveal the interactions between locomotion appendages and granular surfaces, and design more robust locomotion mechanisms.
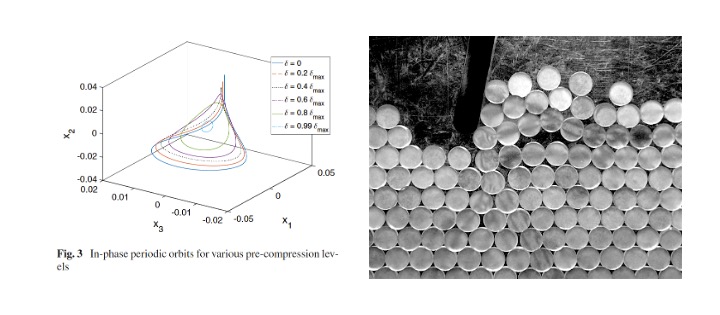
In collaboration with Dr. Balachandran's group at UMD, our research includes both small-scale and large-scale studies to reveal particle-particle contact dynamics and particle-appendage interactions. Our efforts include numerical studies on nonlinear dynamics of granular arrays with Hertzian contact, and experiments with photoelastic particles. We are also developing a machine learning based approach, where we are training a neural network on the data collected from numerical experiments to predict the response of the granular surface to a locomotion mechanism moving on it.
Granular materials are collections of macroscopic particles which show complex, multi-phase behavior. We are interested in robotic locomotion on granular surfaces since energy expenditures of robotic locomotion moving on granular surfaces are significantly higher compared to the packed, flat surfaces. In addition, traction loss on granular surfaces can result in immobility and entrapment of vehicles that are moving in inaccessible territories (e.g. Mars Rover Spirit). Understanding granular media behavior under dynamic loading will help us reveal the interactions between locomotion appendages and granular surfaces, and design more robust locomotion mechanisms.
In collaboration with Dr. Balachandran's group at UMD, our research includes both small-scale and large-scale studies to reveal particle-particle contact dynamics and particle-appendage interactions. Our efforts include numerical studies on nonlinear dynamics of granular arrays with Hertzian contact, and experiments with photoelastic particles. We are also developing a machine learning based approach, where we are training a neural network on the data collected from numerical experiments to predict the response of the granular surface to a locomotion mechanism moving on it.